Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 325 results for "Shu-Heng Chen" clear search
This is an agent-based model that simulates the structural evolution in food supply chain.
An Agent-based Model of Collective Self-organisation in Irrigation Management
Hang Xiong Jingjing Cai | Published Wednesday, April 06, 2016This model simulates how collective self-organisation among individuals that manage irrigation resource collectively.
A data-informed bounded-confidence opinion dynamics model
Bruce Edmonds | Published Wednesday, March 10, 2021The simulation is a variant of the “ToRealSim OD variants - base v2.7” base model, which is based on the standard DW opinion dynamics model (but with the differences that rather than one agent per tick randomly influencing another, all agents randomly influence one other per tick - this seems to make no difference to the outcomes other than to scale simulation time). Influence can be made one-way by turning off the two-way? switch
Various additional variations and sources of noise are possible to test robustness of outcomes to these (compared to DW model).
In this version agent opinions change following the empirical data collected in some experiments (Takács et al 2016).
Such an algorithm leaves no role for the uncertainties in other OD models. [Indeed the data from (Takács et al 2016) indicates that there can be influence even when opinion differences are large - which violates a core assumption of these]. However to allow better comparison with other such models there is a with-un? switch which allows uncertainties to come into play. If this is on, then influence (according to above algorithm) is only calculated if the opinion difference is less than the uncertainty. If an agent is influenced uncertainties are modified in the same way as standard DW models.
Evolution of cooperation, punishment and retaliation
Marco Janssen | Published Friday, September 06, 2013Cultural group selection model of agents playing public good games and who are able to punish and punish back.

REHAB: A Role Playing Game to Explore the Influence of Knowledge and Communication on Natural Resources Management
Christophe Le Page Anne Dray Pascal Perez Claude Garcia | Published Monday, July 13, 2015 | Last modified Monday, July 13, 2015REHAB has been designed as an ice-breaker in courses dealing with ecosystem management and participatory modelling. It helps introducing the two main tools used by the Companion Modelling approach, namely role-playing games and agent-based models.
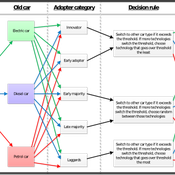
(De-)Stabilising effect of diffusions
Julia Kasmire Bert Van Meeuwen Cornelis Eikelboom | Published Tuesday, August 11, 2015What is stable: the large but coordinated change during a diffusion or the small but constant and uncoordinated changes during a dynamic equilibrium? This agent-based model of a diffusion creates output that reveal insights for system stability.
Bargaining with misvaluation
Marcin Czupryna | Published Wednesday, January 14, 2026Subjective biases and errors systematically affect market equilibria, whether at the population level or in bilateral trading. Here, we consider the possibility that an agent engaged in bilateral trading is mistaken about her own valuation of the good she expects to trade, that has not been explicitly incorporated into the existing bilateral trade literature. Although it may sound paradoxical that a subjective private valuation is something an agent can be mistaken about, as it is up to her to fix it, we consider the case in which that agent, seller or buyer, consciously or not, given the structure of a market, a type of good, and a temporary lack of information, may arrive at an erroneous valuation. The typical context through which this possibility may arise is in relation with so-called experience goods, which are sold while all their intrinsic qualities are still unknown (such as untasted bottled fine wines). We model this “private misvaluation” phenomenon in our study. The agents may also be mistaken about how their exchange counterparties are themselves mistaken. Formally, they attribute a certain margin of error to the other agent, which can differ from the actual way that another agent misvalues the good under consideration. This can constitute the source of a second-order misvaluation. We model different attitudes and situations in which agents face unexpected signals from their counterparties and the manner and extent to which they revise their initial beliefs. We analyse and simulate numerically the consequences of first-order and second-order misvaluation on market equilibria.
Sorghum supply development in Meru County, Kenya
Tim Verwaart Coen Van Wagenberg | Published Wednesday, September 06, 2017 | Last modified Thursday, May 30, 2019Trust between farmers and processors is a key factor in developing stable supply chains including “bottom of the pyramid”, small-scale farmers. This simulation studies a case with 10000 farmers.
A simulation tool for capability-based team task allocation in emergency-responce environments
Afsaneh Fatemi | Published Wednesday, March 16, 2011 | Last modified Saturday, April 27, 2013Its a multi agent simulation environment, provided using JADE/Java. It gets the number of agents and tasks, then divides the physical environment to some segments, and then runs a greedy capability-based coalition formation and task allocation algorithm to assign tasks to groups of agents and complete the tasks.
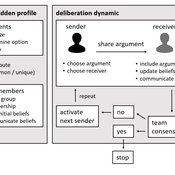
Agent-based model of team decision-making in hidden profile situations
Andreas Flache Jonas Stein Vincenz Frey | Published Thursday, April 20, 2023 | Last modified Friday, November 17, 2023The model presented here is extensively described in the paper ‘Talk less to strangers: How homophily can improve collective decision-making in diverse teams’ (forthcoming at JASSS). A full replication package reproducing all results presented in the paper is accessible at https://osf.io/76hfm/.
Narrative documentation includes a detailed description of the model, including a schematic figure and an extensive representation of the model in pseudocode.
The model develops a formal representation of a diverse work team facing a decision problem as implemented in the experimental setup of the hidden-profile paradigm. We implement a setup where a group seeks to identify the best out of a set of possible decision options. Individuals are equipped with different pieces of information that need to be combined to identify the best option. To this end, we assume a team of N agents. Each agent belongs to one of M groups where each group consists of agents who share a common identity.
The virtual teams in our model face a decision problem, in that the best option out of a set of J discrete options needs to be identified. Every team member forms her own belief about which decision option is best but is open to influence by other team members. Influence is implemented as a sequence of communication events. Agents choose an interaction partner according to homophily h and take turns in sharing an argument with an interaction partner. Every time an argument is emitted, the recipient updates her beliefs and tells her team what option she currently believes to be best. This influence process continues until all agents prefer the same option. This option is the team’s decision.
Displaying 10 of 325 results for "Shu-Heng Chen" clear search