Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1130 results for "Bin-Tzong Chi" clear search
Gunpowder battle tactics
Xavier Rubio-Campillo Jose María Cela Francesc Xavier Hernàndez | Published Wednesday, November 20, 2013 | Last modified Tuesday, November 26, 2013This model simulates the dynamics of eighteenth-century infantry battle tactics. The goal is to explore the effect of different tactics and individual traits in the dynamics of the combat.

ManPraSim: A Management Practice Simulation
peer-olaf_siebers | Published Wednesday, February 23, 2011 | Last modified Saturday, April 27, 2013This simulation model is associated with the journal paper “A First Approach on Modelling Staff Proactiveness in Retail Simulation Models” to appear in the Journal of Artificial Societies and Social Simulation 14 (2) 2. The authors are Peer-Olaf Siebers (pos@cs.nott.ac.uk) and Uwe Aickelin (uxa@cs.nott.ac.uk).
An Agent-Based Model of Internet Diffusion Under General and Specific Network Externalities
Filiz Garip | Published Friday, April 27, 2012 | Last modified Saturday, April 27, 2013Using nodes from the 2002 General Social Survey sample, the code establishes a network of ties with a given homophily bias, and simulates Internet adoption rates in that network under three conditions: (i) no network externalities, (ii) general network externalities, where an individual’s reservation price is a function of the overall adoption rate in the network, (iii) specific network externalities, where reservation price is a function of the adoption rate in individual’s personal […]
The Regional Security Game: An Agent-based, Evolutionary Model of Strategic Evolution and Stability
Anthony Skews | Published Saturday, June 09, 2018The Regional Security Game is a iterated public goods game with punishement based on based on life sciences work by Boyd et al. (2003 ) and Hintze & Adami (2015 ), with modifications appropriate for an international relations setting. The game models a closed regional system in which states compete over the distribution of common security benefits. Drawing on recent work applying cultural evolutionary paradigms in the social sciences, states learn through imitation of successful strategies rather than making instrumentally rational choices. The model includes the option to fit empirical data to the model, with two case studies included: Europe in 1933 on the verge of war and south-east Asia in 2013.
MTC_Model_Pilditch&Madsen
Toby Pilditch | Published Friday, October 09, 2020Micro-targeted vs stochastic political campaigning agent-based model simulation. Written by Toby D. Pilditch (University of Oxford, University College London), in collaboration with Jens K. Madsen (University of Oxford, London School of Economics)
The purpose of the model is to explore the various impacts on voting intention among a population sample, when both stochastic (traditional) and Micto-targeted campaigns (MTCs) are in play. There are several stages of the model: initialization (setup), campaigning (active running protocols) and vote-casting (end of simulation). The campaigning stage consists of update cycles in which “voters” are targeted and “persuaded” - updating their beliefs in the campaign candidate / policies.
Institutional change
Abigail Sullivan | Published Friday, October 07, 2016 | Last modified Sunday, December 02, 2018This model builds on another model in this library (“diffusion of culture”).
Setting the Stage for Inequality
Timothy Dennehy | Published Monday, March 11, 2013 | Last modified Saturday, April 27, 2013How can a strictly egalitarian social system give way to a stratified society if all of its members punish each other for any type of selfish behavior? This model examines the role of prestige bias in constant and variable environments on the development of hierarchies of wealth.
GRASP world
Gert Jan Hofstede | Published Tuesday, April 16, 2019This agent-based model investigates group longevity in a population in a foundational way, using theory on social relations and culture. It is the first application of the GRASP meta-model for social agents, containing elements of Groups, Rituals, Affiliation, Status, and Power. It can be considered an exercise in artificial sociality: a culture-general, content-free base-line trust model from which to engage in more specific studies. Depending on cultural settings for individualism and power distance, as well as settings for xenophobia and for the increase of trust over group life, the GRASP world model generates a variety of patters. Number of groups ranges from one to many, composition from random to segregated, and pattern genesis from rapid to many hundreds of time steps. This makes GRASP world an instrument that plausibly models some basic elements of social structure in different societies.
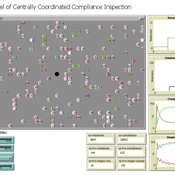
ICARUS - a multi-agent compliance inspection model
Slaven Smojver | Published Monday, May 09, 2022ICARUS is a multi-agent compliance inspection model (ICARUS - Inspecting Compliance to mAny RUleS). The model is applicable to environments where an inspection agency, via centrally coordinated inspections, examines compliance in organizations which must comply with multiple provisions (rules). The model (ICARUS) contains 3 types of agents: entities, inspection agency and inspectors / inspections. ICARUS describes a repeated, simultaneous, non-cooperative game of pure competition. Agents have imperfect, incomplete, asymmetric information. Entities in each move (tick) choose a pure strategy (comply/violate) for each rule, depending on their own subjective assessment of the probability of the inspection. The Inspection Agency carries out the given inspection strategy.
A more detailed description of the model is available in the .nlogo file.
Full description of the model (in line with the ODD+D protocol) and the analysis of the model (including verification, validation and sensitivity analysis) can be found in the attached documentation.
EU language skills
Marco Civico | Published Sunday, July 07, 2024The objective of this agent-based model is to test different language education orientations and their consequences for the EU population in terms of linguistic disenfranchisement, that is, the inability of citizens to understand EU documents and parliamentary discussions should their native language(s) no longer be official. I will focus on the impact of linguistic distance and language learning. Ideally, this model would be a tool to help EU policy makers make informed decisions about language practices and education policies, taking into account their consequences in terms of diversity and linguistic disenfranchisement. The model can be used to force agents to make certain choices in terms of language skills acquisition. The user can then go on to compare different scenarios in which language skills are acquired according to different rationales. The idea is that, by forcing agents to adopt certain language learning strategies, the model user can simulate policies promoting the acquisition of language skills and get an idea of their impact. In this way the model allows not only to sketch various scenarios of the evolution of language skills among EU citizens, but also to estimate the level of disenfranchisement in each of these scenarios.
Displaying 10 of 1130 results for "Bin-Tzong Chi" clear search