Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 1009 results for "Rolf Anker Ims" clear search
Rangeland and evolution of management styles
Marco Janssen | Published Tuesday, January 14, 2020Provided is a landscape of properties where pastoralists make decisions how much livestock they put on their property and how much to suppress fire from occuring. Rangelands can be grass dominated, or unproductive shrubb dominated. Overgrazing and fire suppresion lead to shrub dominated landscapes. What management strategies evolve, and how is this impacted by policies?
The model is discussed in Introduction to Agent-Based Modeling by Marco Janssen. For more information see https://intro2abm.com/.
Non-attentional visual information transmission in groups under predation
J. Fransje Weerden, van | Published Wednesday, March 25, 2020Our aim is to show effects of group living when only low-level cognition is assumed, such as pattern recognition needed for normal functioning, without assuming individuals have knowledge about others around them or warn them actively.
The model is of a group of vigilant foragers staying within a patch, under attack by a predator. The foragers use attentional scanning for predator detection, and flee after detection. This fleeing action constitutes a visual cue to danger, and can be received non-attentionally by others if it occurs within their limited visual field. The focus of this model is on the effectiveness of this non-attentional visual information reception.
A blind angle obstructing cue reception caused by behaviour can exist in front, morphology causes a blind angle in the back. These limitations are represented by two visual field shapes. The scan for predators is all-around, with distance-dependent detection; reception of flight cues is limited by visual field shape.
Initial parameters for instance: group sizes, movement, vision characteristics for predator detection and for cue reception. Captures (failure), number of times the information reached all individuals at the same time (All-fled, success), and several other effects of the visual settings are recorded.
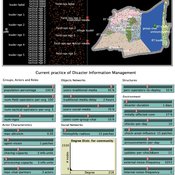
Peer reviewed Share: bottom-up disaster information management
Vittorio Nespeca Tina Comes Frances Brazier | Published Monday, December 05, 2022This model is intended to study the way information is collectively managed (i.e. shared, collected, processed, and stored) in a system and how it performs during a crisis or disaster. Performance is assessed in terms of the system’s ability to provide the information needed to the actors who need it when they need it. There are two main types of actors in the simulation, namely communities and professional responders. Their ability to exchange information is crucial to improve the system’s performance as each of them has direct access to only part of the information they need.
In a nutshell, the following occurs during a simulation. Due to a disaster, a series of randomly occurring disruptive events takes place. The actors in the simulation need to keep track of such events. Specifically, each event generates information needs for the different actors, which increases the information gaps (i.e. the “piles” of unaddressed information needs). In order to reduce the information gaps, the actors need to “discover” the pieces of information they need. The desired behavior or performance of the system is to keep the information gaps as low as possible, which is to address as many information needs as possible as they occur.
FilterBubbles_in_Carley1991
Benoît Desmarchelier | Published Wednesday, May 21, 2025The model is an extension of: Carley K. (1991) “A theory of group stability”, American Sociological Review, vol. 56, pp. 331-354.
The original model from Carley (1991) works as follows:
- Agents know or ignore a series of knowledge facts;
- At each time step, each agent i choose a partner j to interact with at random, with a probability of choice proportional to the degree of knowledge facts they have in common.
- Agents interact synchronously. As such, interaction happens only if the partnert j is not already busy interacting with someone else.
…
Learning Extension - RAGE RAngeland Grazing Model
Nikita Strelkovskii Cristina I. Apetrei Nikolay Khabarov Valeria Javalera Rincón | Published Saturday, July 22, 2023This is an extension of the original RAGE model (Dressler et al. 2018), where we add learning capabilities to agents, specifically learning-by-doing and social learning (two processes central to adaptive (co-)management).
The extension module is applied to smallholder farmers’ decision-making - here, a pasture (patch) is the private property of the household (agent) placed on it and there is no movement of the households. Households observe the state of the pasture and their neighrbours to make decisions on how many livestock to place on their pasture every year. Three new behavioural types are created (which cannot be combined with the original ones): E-RO (baseline behaviour), E-LBD (learning-by-doing) and E-RO-SL1 (social learning). Similarly to the original model, these three types can be compared regarding long-term social-ecological performance. In addition, a global strategy switching option (corresponding to double-loop learning) allows users to study how behavioural strategies diffuse in a heterogeneous population of learning and non-learning agents.
An important modification of the original model is that extension agents are heterogeneous in how they deal with uncertainty. This is represented by an agent property, called the r-parameter (household-risk-att in the code). The r-parameter is catch-all for various factors that form an agent’s disposition to act in a certain way, such as: uncertainty in the sensing (partial observability of the resource system), noise in the information received, or an inherent characteristic of the agent, for instance, their risk attitude.
Negotiation Lab 1.0
Julián Arévalo | Published Friday, March 20, 2026Negotiation Lab 1.0 is an agent-based model of peace negotiations that explores how the parties’ readiness — their motivation and optimism to engage in talks — evolves dynamically throughout the negotiation process. The model reconceptualizes readiness as an adaptive state variable that is continuously updated through feedback from negotiation outcomes, rather than a static precondition assessed at the onset of talks.
The model simulates two parties negotiating a multi-issue agenda. In each round, parties allocate effort to the current sub-issue; outcomes depend on their joint effort and a stochastic component representing external factors. Results feed back into each party’s readiness, shaping subsequent engagement. The negotiation ends either when all agenda items are resolved (agreement) or when a party’s readiness falls below a critical threshold (breakdown).
Key parameters include the initial readiness of each party, agenda structure (balanced, hard, easy, red, or random), type of negotiation (from highly cooperative to highly competitive), and each party’s effort strategy (always high, always low, random, or pseudo tit-for-tat). The model shows that while initial readiness is associated with negotiation outcomes, it is neither necessary nor sufficient to determine them: process variables — the type of interaction, agenda design, and adaptive effort strategies — exert comparatively larger effects on outcomes. Identical initial conditions can produce widely divergent trajectories, illustrating path dependence and sensitivity to feedback dynamics.
The model is implemented in NetLogo 7.0 and is documented using the ODD+D protocol. It is associated with the paper “Beyond Initial Conditions: How Adaptive Readiness Shapes Peace Negotiation Outcomes” (Arévalo, under review).
MERCURY extension: transport-cost
Tom Brughmans | Published Monday, July 23, 2018This is extended version of the MERCRUY model (Brughmans 2015) incorporates a ‘transport-cost’ variable, and is otherwise unchanged. This extended model is described in this publication: Brughmans, T., 2019. Evaluating the potential of computational modelling for informing debates on Roman economic integration, in: Verboven, K., Poblome, J. (Eds.), Structural Determinants in the Roman World.
Brughmans, T., 2015. MERCURY: an ABM of tableware trade in the Roman East. CoMSES Comput. Model Libr. URL https://www.comses.net/codebases/4347/releases/1.1.0/
Replication of an agent-based model using the Replication Standard
Derek Robinson Jiaxin Zhang | Published Sunday, January 20, 2019 | Last modified Saturday, July 18, 2020This model is a replication model which is constructed based on the existing model used by the following article:
Brown, D.G. and Robinson, D.T., 2006. Effects of heterogeneity in residential preferences on an agent-based model of urban sprawl. Ecology and society, 11(1).
The original model is called SLUCE’s Original Model for Experimentation (SOME). In Brown and Robinson (2006)’s article, the SOME model was used to explore the impacts of heterogeneity in residential location selections on the research of urban sprawl. The original model was constructed using Objective-C language based on SWARM platform. This replication model is built by NetLogo language on NetLogo platform. We successfully replicate that model and demonstrated the reliability and replicability of it.
Opinion dynamics model for prediction markets
Valerio Restocchi | Published Monday, July 31, 2023We introduce a model of prediction markets that uses opinion dynamics as its underlying mechanism for price formation. We base the opinion dynamics on the Deffuant model of bounded rationality. We have used this model to show that price formation in prediction markets can be robustly explained by opinion dynamics, and that the model can also explain phase transitions depending on just two parameters.
Thoughtless conformity and spread of norms in an artificial society (Grid Model)
Muhammad Azfar Nisar | Published Tuesday, May 27, 2014This model is a small extension (rectangular layout) of Joshua Epstein’s (2001) model on development of thoughtless conformity in an artificial society of agents.
Displaying 10 of 1009 results for "Rolf Anker Ims" clear search