Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 391 results for "Huw Vasey" clear search
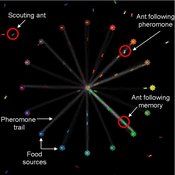
Composite Collective Decision Making - ant colony foraging model
Tomer Czaczkes Benjamin I Czaczkes | Published Thursday, December 17, 2015The model explores how two types of information - social (in the form of pheromone trails) and private (in the form of route memories) affect ant colony level foraging in a variable enviroment.
Relative Agreement Model and Network Structure
Spiro Maroulis David Adelberg | Published Friday, January 29, 2016This adaptation of the Relative Agreement model of opinion dynamics (Deffuant et al. 2002) extends the Meadows and Cliff (2012) implementation of this model in a manner that explores the effect of the network structure among the agents.
Expectation-Based Bayesian Belief Revision
C Merdes Momme Von Sydow Ulrike Hahn | Published Monday, June 19, 2017 | Last modified Monday, August 06, 2018This model implements a Bayesian belief revision model that contrasts an ideal agent in possesion of true likelihoods, an agent using a fixed estimate of trusting its source of information, and an agent updating its trust estimate.
A network agent-based model of ethnocentrism and intergroup cooperation
Ross Gore | Published Sunday, October 27, 2019We present a network agent-based model of ethnocentrism and intergroup cooperation in which agents from two groups (majority and minority) change their communality (feeling of group solidarity), cooperation strategy and social ties, depending on a barrier of “likeness” (affinity). Our purpose was to study the model’s capability for describing how the mechanisms of preexisting markers (or “tags”) that can work as cues for inducing in-group bias, imitation, and reaction to non-cooperating agents, lead to ethnocentrism or intergroup cooperation and influence the formation of the network of mixed ties between agents of different groups. We explored the model’s behavior via four experiments in which we studied the combined effects of “likeness,” relative size of the minority group, degree of connectivity of the social network, game difficulty (strength) and relative frequencies of strategy revision and structural adaptation. The parameters that have a stronger influence on the emerging dominant strategies and the formation of mixed ties in the social network are the group-tag barrier, the frequency with which agents react to adverse partners, and the game difficulty. The relative size of the minority group also plays a role in increasing the percentage of mixed ties in the social network. This is consistent with the intergroup ties being dependent on the “arena” of contact (with progressively stronger barriers from e.g. workmates to close relatives), and with measures that hinder intergroup contact also hindering mutual cooperation.

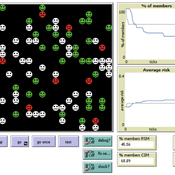
RiskNetABM
Birgit Müller Jürgen Groeneveld Karin Frank Meike Will Friederike Lenel | Published Monday, July 20, 2020 | Last modified Monday, May 03, 2021The fight against poverty is an urgent global challenge. Microinsurance is promoted as a valuable instrument for buffering income losses due to health or climate-related risks of low-income households in developing countries. However, apart from direct positive effects they can have unintended side effects when insured households lower their contribution to traditional arrangements where risk is shared through private monetary support.
RiskNetABM is an agent-based model that captures dynamics between income losses, insurance payments and informal risk-sharing. The model explicitly includes decisions about informal transfers. It can be used to assess the impact of insurance products and informal risk-sharing arrangements on the resilience of smallholders. Specifically, it allows to analyze whether and how economic needs (i.e. level of living costs) and characteristics of extreme events (i.e. frequency, intensity and type of shock) influence the ability of insurance and informal risk-sharing to buffer income shocks. Two types of behavior with regard to private monetary transfers are explicitly distinguished: (1) all households provide transfers whenever they can afford it and (2) insured households do not show solidarity with their uninsured peers.
The model is stylized and is not used to analyze a particular case study, but represents conditions from several regions with different risk contexts where informal risk-sharing networks between smallholder farmers are prevalent.
…
Risk-Sharing under Heterogeneity: NetLogo simulation
Eva Vriens | Published Monday, February 28, 2022Motivated by the emergence of new Peer-to-Peer insurance organizations that rethink how insurance is organized, we propose a theoretical model of decision-making in risk-sharing arrangements with risk heterogeneity and incomplete information about the risk distribution as core features. For these new, informal organisations, the available institutional solutions to heterogeneity (e.g., mandatory participation or price differentiation) are either impossible or undesirable. Hence, we need to understand the scope conditions under which individuals are motivated to participate in a bottom-up risk-sharing setting. The model puts forward participation as a utility maximizing alternative for agents with higher risk levels, who are more risk averse, are driven more by solidarity motives, and less susceptible to cost fluctuations. This basic micro-level model is used to simulate decision-making for agent populations in a dynamic, interdependent setting. Simulation results show that successful risk-sharing arrangements may work if participants are driven by motivations of solidarity or risk aversion, but this is less likely in populations more heterogeneous in risk, as the individual motivations can less often make up for the larger cost deficiencies. At the same time, more heterogeneous groups deal better with uncertainty and temporary cost fluctuations than more homogeneous populations do. In the latter, cascades following temporary peaks in support requests more often result in complete failure, while under full information about the risk distribution this would not have happened.
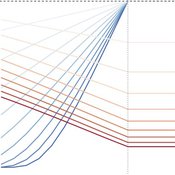
Peer reviewed Price Evolution with Expectations
J M Applegate Gesine Steudel Armin Haas Carlo Jaeger | Published Friday, September 10, 2021The Price Evolution with Expectations model provides the opportunity to explore the question of non-equilibrium market dynamics, and how and under which conditions an economic system converges to the classically defined economic equilibrium. To accomplish this, we bring together two points of view of the economy; the classical perspective of general equilibrium theory and an evolutionary perspective, in which the current development of the economic system determines the possibilities for further evolution.
The Price Evolution with Expectations model consists of a representative firm producing no profit but producing a single good, which we call sugar, and a representative household which provides labour to the firm and purchases sugar.The model explores the evolutionary dynamics whereby the firm does not initially know the household demand but eventually this demand and thus the correct price for sugar given the household’s optimal labour.
The model can be run in one of two ways; the first does not include money and the second uses money such that the firm and/or the household have an endowment that can be spent or saved. In either case, the household has preferences for leisure and consumption and a demand function relating sugar and price, and the firm has a production function and learns the household demand over a set number of time steps using either an endogenous or exogenous learning algorithm. The resulting equilibria, or fixed points of the system, may or may not match the classical economic equilibrium.
Large-scale land acqusitions and smallholder food security
Tim Williams | Published Thursday, September 16, 2021Large-scale land acquisitions (LSLAs) threaten smallholder livelihoods globally. Despite more than a decade of research on the LSLA phenomenon, it remains a challenge to identify governance conditions that may foster beneficial outcomes for both smallholders and investors. One potentially promising strategy toward this end is contract farming (CF), which more directly involves smallholder households in commodity production than conditions of acquisition and displacement.
To improve understanding of how CF may mediate the outcomes of LSLAs, we developed an agent-based model of smallholder livelihoods, which we used as a virtual laboratory to experiment on a range of hypothetical LSLA and CF implementation scenarios.
The model represents a community of smallholder households in a mixed crop-livestock system. Each agent farms their own land and manages a herd of livestock. Agents can also engage in off-farm employment, for which they earn a fixed wage and compete for a limited number of jobs. The principal model outputs include measures of household food security (representing access to a single, staple food crop) and agricultural production (of a single, staple food crop).
…
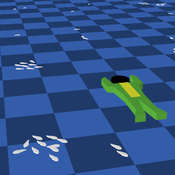
Peer reviewed FishCensus
Miguel Pais | Published Tuesday, December 06, 2016 | Last modified Thursday, February 09, 2017The FishCensus model simulates underwater visual census methods, where a diver estimates the abundance of fish. A separate model is used to shape species behaviours and save them to a file that can be shared and used by the counting model.
An Opinion Dynamics of Science? Agent-Based Modeling of Knowledge Spread
Bernardo Buarque | Published Thursday, April 13, 2023We present a socio-epistemic model of science inspired by the existing literature on opinion dynamics. In this model, we embed the agents (or scientists) into social networks - e.g., we link those who work in the same institutions. And we place them into a regular lattice - each representing a unique mental model. Thus, the global environment describes networks of concepts connected based on their similarity. For instance, we may interpret the neighbor lattices as two equivalent models, except one does not include a causal path between two variables.
Agents interact with one another and move across the epistemic lattices. In other words, we allow the agents to explore or travel across the mental models. However, we constrain their movements based on absorptive capacity and cognitive coherence. Namely, in each round, an agent picks a focal point - e.g., one of their colleagues - and will move towards it. But the agents’ ability to move and speed depends on how far apart they are from the focal point - and if their new position is cognitive/logic consistent.
Therefore, we propose an analytical model that examines the connection between agents’ accumulated knowledge, social learning, and the span of attitudes towards mental models in an artificial society. While we rely on the example from the General Theory of Relativity renaissance, our goal is to observe what determines the creation and diffusion of mental models. We offer quantitative and inductive research, which collects data from an artificial environment to elaborate generalized theories about the evolution of science.
Displaying 10 of 391 results for "Huw Vasey" clear search