Our mission is to help computational modelers develop, document, and share their computational models in accordance with community standards and good open science and software engineering practices. Model authors can publish their model source code in the Computational Model Library with narrative documentation as well as metadata that supports open science and emerging norms that facilitate software citation, computational reproducibility / frictionless reuse, and interoperability. Model authors can also request private peer review of their computational models. Models that pass peer review receive a DOI once published.
All users of models published in the library must cite model authors when they use and benefit from their code.
Please check out our model publishing tutorial and feel free to contact us if you have any questions or concerns about publishing your model(s) in the Computational Model Library.
Displaying 10 of 994 results for "M Van Den Hoven" clear search
An Agent-Based Model of Collective Action
Hai-Hua Hu | Published Tuesday, August 20, 2013We provide an agent-based model of collective action, informed by Granovetter (1978) and its replication model by Siegel (2009). We use the model to examine the role of ICTs in collective action under different cultural and political contexts.
An Agent-Based School Choice Matching Model
Connie Wang Weikai Chen Shu-Heng Chen | Published Sunday, February 01, 2015 | Last modified Wednesday, March 06, 2019This model is to simulate and compare the admission effects of 3 school matching mechanisms, serial dictatorship, Boston mechanism, and Chinese Parallel, under different settings of information released.
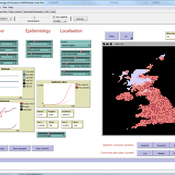
TELL ME: protective behaviour in an epidemic
Jennifer Badham | Published Tuesday, February 10, 2015Models the connection between health agency communication, personal protective behaviour (eg vaccination, hand hygiene) and influenza transmission.

Peer reviewed An agent-based model for brain drain
Furkan Gürsoy Bertan Badur | Published Wednesday, March 03, 2021 | Last modified Friday, March 12, 2021An agent-based model for the emigration of highly-skilled labour.
We hypothesise that there are two main factors that impact the decision and ability to move abroad: desire to maximise individual utility and network effects. Accordingly, several factors play role in brain drain such as the overall economic and social differences between the home and host countries, people’s ability and capacity to obtain good jobs and start a life abroad, the barriers of moving abroad, and people’s social network who are already working abroad.
An Agent-Based Model of Language Contact
Marco Civico | Published Tuesday, July 30, 2019This model is part of an article that discusses the adoption of a complexity theory approach to study the dynamics of language contact within multilingual communities. The model simulates the dynamics of communication within a community where a minority and a majority group coexist. The individual choice of language for communication is based on a number of simple rules derived from a review of the main literature on the topic of language contact. These rules are then combined with different variables, such as the rate of exogamy of the minority group and the presence of relevant education policies, to estimate the trends of assimilation of the minority group into the majority one. The model is validated using actually observed data from the case of Romansh speakers in the canton of Grisons, Switzerland.
Peer reviewed Minding Norms in an Epidemic Does Matter
Klaus G. Troitzsch | Published Saturday, February 27, 2021 | Last modified Monday, September 13, 2021This paper tries to shed some light on the mutual influence of citizen behaviour and the spread of a virus in an epidemic. While the spread of a virus from infectious to susceptible persons and the outbreak of an infection leading to more or less severe illness and, finally, to recovery and immunity or death has been modelled with different kinds of models in the past, the influence of certain behaviours to keep the epidemic low and to follow recommendations of others to apply these behaviours has rarely been modelled. The model introduced here uses a theory of the effect of norm invocations among persons to find out the effect of spreading norms interacts with the progress of an epidemic. Results show that norm invocations matter. The model replicates the histories of the COVID-19 epidemic in various region, including “second waves” (but only until the end of 2021 as afterwards the official statistics ceased to be reliable as many infected persons did not report their positive test results after countermeasures were relieved), and shows that the calculation of the reproduction numbers from current reported infections usually overestimates the “real” but in practice unobservable reproduction number.
An ABM of historic British milk consumption
Matthew Gibson | Published Monday, December 20, 2021Substitution of food products will be key to realising widespread adoption of sustainable diets. We present an agent-based model of decision-making and influences on food choice, and apply it to historically observed trends of British whole and skimmed (including semi) milk consumption from 1974 to 2005. We aim to give a plausible representation of milk choice substitution, and test different mechanisms of choice consideration. Agents are consumers that perceive information regarding the two milk choices, and hold values that inform their position on the health and environmental impact of those choices. Habit, social influence and post-decision evaluation are modelled. Representative survey data on human values and long-running public concerns empirically inform the model. An experiment was run to compare two model variants by how they perform in reproducing these trends. This was measured by recording mean weekly milk consumption per person. The variants differed in how agents became disposed to consider alternative milk choices. One followed a threshold approach, the other was probability based. All other model aspects remained unchanged. An optimisation exercise via an evolutionary algorithm was used to calibrate the model variants independently to observed data. Following calibration, uncertainty and global variance-based temporal sensitivity analysis were conducted. Both model variants were able to reproduce the general pattern of historical milk consumption, however, the probability-based approach gave a closer fit to the observed data, but over a wider range of uncertainty. This responds to, and further highlights, the need for research that looks at, and compares, different models of human decision-making in agent-based and simulation models. This study is the first to present an agent-based modelling of food choice substitution in the context of British milk consumption. It can serve as a valuable pre-curser to the modelling of dietary shift and sustainable product substitution to plant-based alternatives in Britain.
Peer reviewed Flibs'NLogo - An elementary form of evolutionary cognition
Cosimo Leuci | Published Thursday, January 30, 2020 | Last modified Monday, June 15, 2026Flibs’NLogo is an agent-based simulation implemented in NetLogo that models the evolution of perfect predictors through a genetic algorithm. The agents, called flibs (finite living blobs), are finite‑state automata whose behaviour is encoded in circular chromosomes. They inhabit a “primordial computer soup” and are tasked with anticipating a user‑defined periodic binary sequence. Each generation consists of 100 evaluation cycles, during which a flib’s fitness is incremented each time its output correctly matches the next environmental signal.
Reproduction follows an elitist scheme: a donor (current fittest individual) replaces a randomly chosen recipient either by cloning (complete genome substitution) or by bacterial‑like conjugation (unidirectional horizontal transfer of a random chromosome segment). A stochastic mutagenesis operator introduces point mutations in genes, while the reproductive strategy gene can also switch under a mixed-reproduction regime. Population dynamics are monitored via genomic diversity indices (Shannon‑Wiener, Simpson), a phenotypic simpleness metric that distinguishes the low number of states actually used from the genomic potential.
The model serves as a digital evolutionary laboratory for exploring the interplay among bounded rationality, collective adaptation, and the emergence of anticipatory behaviour. By linking evolutionary computation with cognitive concepts, Flibs’NLogo investigates fundamental transitions from reactive to predictive systems and allows for testing whether populations evolve toward minimal necessary complexity or exhibit an intrinsic drift toward structural elaboration.
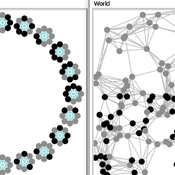
Two agent-based models of cooperation in dynamic groups and fixed social networks
Carlos A. de Matos Fernandes | Published Thursday, January 20, 2022Both models simulate n-person prisoner dilemma in groups (left figure) where agents decide to C/D – using a stochastic threshold algorithm with reinforcement learning components. We model fixed (single group ABM) and dynamic groups (bad-barrels ABM). The purpose of the bad-barrels model is to assess the impact of information during meritocratic matching. In the bad-barrels model, we incorporated a multidimensional structure in which agents are also embedded in a social network (2-person PD). We modeled a random and homophilous network via a random spatial graph algorithm (right figure).
Can ethnic tolerance curb self-reinforcing school segregation? A theoretical Agent Based Model
Lucas Sage Andreas Flache | Published Monday, August 10, 2020Schelling and Sakoda prominently proposed computational models suggesting that strong ethnic residential segregation can be the unintended outcome of a self-reinforcing dynamic driven by choices of individuals with rather tolerant ethnic preferences. There are only few attempts to apply this view to school choice, another important arena in which ethnic segregation occurs. In the current paper, we explore with an agent-based theoretical model similar to those proposed for residential segregation, how ethnic tolerance among parents can affect the level of school segregation. More specifically, we ask whether and under which conditions school segregation could be reduced if more parents hold tolerant ethnic preferences. We move beyond earlier models of school segregation in three ways. First, we model individual school choices using a random utility discrete choice approach. Second, we vary the pattern of ethnic segregation in the residential context of school choices systematically, comparing residential maps in which segregation is unrelated to parents’ level of tolerance to residential maps reflecting their ethnic preferences. Third, we introduce heterogeneity in tolerance levels among parents belonging to the same group. Our simulation experiments suggest that ethnic school segregation can be a very robust phenomenon, occurring even when about half of the population prefers mixed to segregated schools. However, we also identify a “sweet spot” in the parameter space in which a larger proportion of tolerant parents makes the biggest difference. This is the case when parents have moderate preferences for nearby schools and there is only little residential segregation. Further experiments are presented that unravel the underlying mechanisms.
Displaying 10 of 994 results for "M Van Den Hoven" clear search